


En una variedad de aplicaciones de automatización industrial, dos tipos de componentes son los más utilizados: sensores fotoeléctricos y sensores inductivos (de proximidad).
Según el autor de este artículo, Jacek Bogusz, de la compañía TME, ambos tienen sus pros y sus contras que determinan su uso.
Por ejemplo, si un sensor inductivo puede detectar objetos metálicos ocultos detrás de un obstáculo opaco, no metálico, entonces esta opción no está disponible para un sensor fotoeléctrico que debe «ver» el objeto en algún rango de luz.
Por otro lado, si usamos luz láser en dicho sensor, el rango de detección puede ser muy grande, llegando a varias docenas de metros. Los sensores de inducción ya no pueden presumir de tal rango.
El sensor fotoeléctrico funciona midiendo la intensidad de la luz del haz emitido por el transmisor, que incide en el elemento fotosensible del receptor. Dependiendo del propósito del sensor, se utilizan diferentes tipos de luz y el haz se modula. El más utilizado es con luz infrarroja, invisible para el ojo humano. Gracias a esta detección, se puede llevar a cabo de manera distractora, pero también tiene sus inconvenientes, como lo convence cada instalador, por ejemplo, un sensor en la puerta, cuya tarea es evitar que se cierre cuando un vehículo se encuentra en ella. Es por eso por lo que los punteros láser a menudo se usan como accesorios durante los trabajos de ensamblaje, lo que facilita el posicionamiento mutuo del transmisor y el receptor.
Muchos sensores fotoeléctricos están equipados con diodos que indican el estado de su trabajo, incluida la cooperación correcta del transmisor y el receptor. La observación de estos LED y sus colores de iluminación facilita la instalación adecuada de sensores y determina el estado de la salida o la corrección de la reacción al objeto, lo cual es particularmente importante cuando la sensibilidad es ajustable.
Criterios para diseñar con sensores fotoeléctricos
Casi todos los diseñadores electrónicos, ingenieros de automatización o integradores, debido a que son los que utilizan con mayor frecuencia un sensor fotoeléctrico, podrán evaluar fácilmente los requisitos de la aplicación de destino y elegir el tipo correcto de sensor.
Ciertamente, los criterios importantes serán factores tales como: el entorno de trabajo del sensor, la temperatura ambiente, la resistencia mecánica (y todos estos factores afectarán la elección del material de la carcasa, su estanqueidad IP y el método de montaje), el tipo de luz en el entorno, el propósito del sensor y el rango requerido detección, tensión de alimentación disponible o tipo de salida. En algunas aplicaciones, el tiempo de respuesta del sensor puede ser de gran importancia, aunque es poco probable que esto se espere de los sensores de largo alcance.
El tipo de objeto u objetos detectados por los sensores fotoeléctricos también será un criterio extremadamente importante. Algunos sensores ya reaccionan cuando una película delgada y transparente se encuentra en el camino del haz entre el transmisor y el receptor. Otros requieren que el objeto sea casi completamente opaco. Otros más están equipados con un potenciómetro para el ajuste de sensibilidad, gracias al cual se puede establecer con precisión el umbral de respuesta.
Marcas por aplicaciones de sensores
Al elegir un sensor, también es bueno ser guiado por la marca. Para aplicaciones industriales u otros dispositivos donde el funcionamiento fiable del sensor es importante, no solo por la seguridad de los usuarios, sino también por la comodidad de usar la aplicación, vale la pena buscar productos probados de fabricantes conocidos. Por ejemplo, si el fabricante del sensor es, por ejemplo, Panasonic, se puede suponer que se realizó un control de calidad exhaustivo de los sensores, y estos funcionarán de manera confiable y estable.
Veamos cómo puede poner en funcionamiento un sensor de este tipo junto con cualquier PLC. Aunque el programa de muestra fue hecho para Siemens LOGO! v8, gracias a la legibilidad del lenguaje FBD sin mucho esfuerzo, puede adaptarse para su uso en otra plataforma.
Al tener un sensor fotoeléctrico, es muy difícil reconocer la dirección del movimiento del objeto. Para poder hacer esto, debe modular el haz de luz y usar el efecto Doppler, o medir el tiempo entre pulsos de pulsos enviados hacia el objeto. Sin embargo, estos métodos son difíciles de implementar en la práctica, son bastante caros y no todos pueden manejarlos. Es mucho más fácil colocar dos sensores uno al lado del otro y verificar el orden de activación.
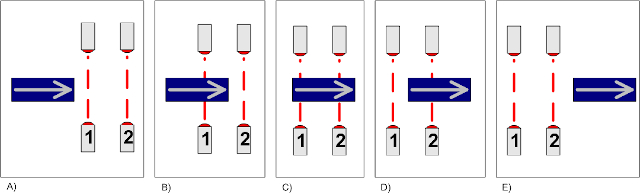
En el dibujo 1 Se muestra el principio de esta solución. Si usamos dos sensores, numeremos los por convención “1” y “2” – funcionará “1”, y luego “2” puede indicar la dirección convencional de movimiento hacia la derecha y en orden inverso, hacia la izquierda. Sin embargo, para que nuestro algoritmo funcione de manera confiable y se pueda usar no solo para detectar la dirección del movimiento, sino también, por ejemplo, para contar objetos, aún debemos introducir algunas restricciones. En primer lugar, el objeto debe moverse frente a los sensores para que funcionen, pero es algo obvio. En segundo lugar, la distancia máxima entre los sensores no puede ser mayor que las dimensiones más pequeñas del objeto. Gracias a esto, nuestros sensores funcionarán en orden, por ejemplo:
Ambos inactivos a “1” encendido a ”1” y “2” encendidos a “2” encendido a ambos inactivos
En tercer lugar, los movimientos accidentales del objeto que se verifica entre los sensores fotoeléctricos no deberían causar un mal funcionamiento de la instalación. Claro, este es un programa y es imposible descartar todos los errores lógicos, pero a pesar de esto, debe verificarlo cuidadosamente con la ayuda de un simulador o una instalación modelo, probando el algoritmo en diversas situaciones que pueden suceder en la práctica.
En el dibujo 2 hay un programa de ejemplo en lenguaje FBD escrito en un entorno libre LOGO! Soft Comfort. Si usáramos el controlador LOGO!, en su entrada I1 e I2 tendrá que proporcionar un voltaje que represente lógico “1”. Si fuera LOGO! 24RC, entonces tendríamos tensión en rango 18-24V CC. Si usamos la versión alimentada por 230V AC, entonces el «1» lógico representa un voltaje mucho más alto, pero luego se presta atención al tipo y parámetros de la salida del sensor!
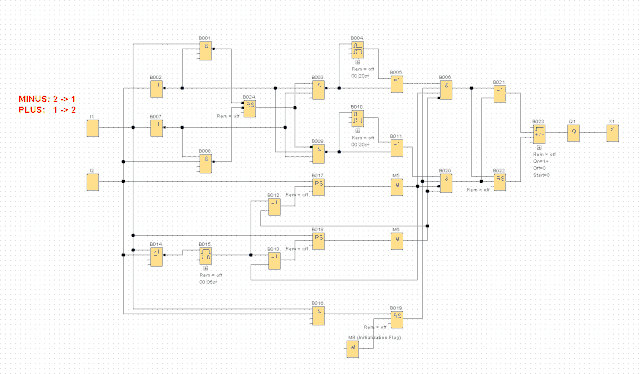
Como se mencionó, el voltaje de los contactos del sensor debe conectarse a las entradas I1 (del sensor «1») e I2 (del sensor «2»). El programa está escrito de tal manera que la dirección del movimiento de I1 a I2 genera un impulso en la salida de la puerta B020, mientras que de I2 a I1 en la salida de la puerta B006.
Para demostrar la usabilidad de la aplicación de muestra, se conectan un contador bidireccional (B023) y un circuito lógico (B021 – compuerta XOR, B022 – flip-flop RS) a las salidas de ambas compuertas. El propósito del circuito lógico es establecer la entrada de la dirección de conteo si entran pulsos «positivos» (desde la puerta B020) y cero si es negativo (desde la puerta B006) y calcular la forma de onda del reloj dada a la entrada de conteo. Al configurar y restablecer la entrada de la dirección de conteo, el contador cuenta hacia arriba (conjunto de entrada) o hacia abajo (entrada puesta a cero).
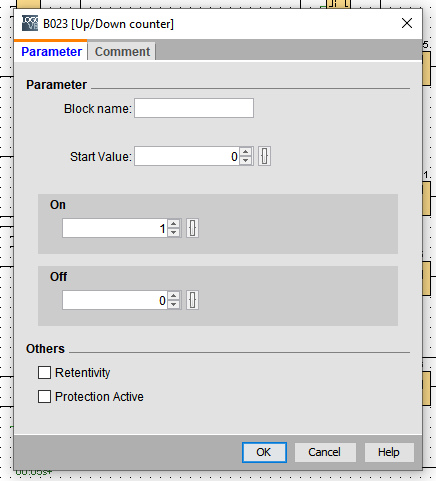
El bloque del contador Up/Down Counter en LOGO! tiene una salida establecida y puesta a zero de acuerdo con las condiciones establecidas en la ventana de propiedades del medidor. Si, como en el Dibujo 3, ingresamos «1» en el campo «Encendido», mientras que «0» se deja en el campo «Apagado», la salida se establecerá cuando el valor del contador sea mayor que 0 y cero si es 0.
Si ahora de esta salida suministraremos el bloque de función de salida, por ejemplo, Q1, es el relé de salida número 1 del LOGO! 24RC hará contactos cuando el nivel del medidor sea mayor que 0.
De esta manera, podemos construir rápida y fácilmente un dispositivo que enciende y apaga automáticamente las luces, contando a las personas que entran y salen de la habitación. La luz debe encenderse si alguien entra y se apaga si todos salen.
Si está interesado en implementar sensores fotoeléctricos para detectar el movimiento, mire en este enlace del distribuidor internacional TME.









{kind=link}