



Jochen Neller, responsable de soporte técnico de Rutronik Elektronische Bauelemente habla en este artículo de los beneficios de utilizar choques de modo común para electrónica del automóvil ya que producen seguridad a pesar del aumento de las interferencias.
La creciente cantidad de sistemas avanzados de asistencia al conductor (ADAS) y la necesidad de reducir el consumo de combustible de los vehículos han provocado el aumento del número de las centralitas o unidades de control electrónico (ECU) y de la demanda de redes más rápidas. El cableado LAN interno genera y absorbe interferencias de radio y radiación externa, respectivamente. Para poder garantizar la fiabilidad funcional, resulta esencial efectuar una supresión adecuada de estas interferencias.
Los fabricantes de componentes inductivos ya han desarrollado choques de modo común específicos para las redes de datos encontradas en los vehículos de motor, con sus elevados niveles de radiación de interferencia. Algunos utilizan materiales magnéticos creados por ellos mismos, técnicas de bobinado especiales o tecnologías propias a la hora de proporcionar los diseños de circuitos magnéticos.
Los choques de modo común para suprimir la interferencia están disponibles con una amplia variedad de especificaciones y en diseños a medida para una determinada aplicación. Se suelen emplear en fuentes de alimentación (como, por ejemplo, las conmutadas – SMPS) y son fáciles de usar cuando se encuentran bien dimensionados. Aparte de las corrientes de señal, también se debe tener en cuenta la disipación de calor.
Choques de modo común para electrónica del automóvil
Los choques de modo común son componentes inductivos pasivos utilizados para la transmisión de señales frente a interferencias de alta frecuencia. Se componen de varias bobinas dispuestas en direcciones opuestas alrededor de un núcleo ferromagnético. Como ofrecen una elevada impedancia con frecuencias altas, compensan corrientes unidireccionales, es decir, convierten las señales de interferencia en líneas de señal de, por ejemplo, un sistema de bus digital. Las señales diferenciales de baja frecuencia, por el otro lado, pueden “pasar” sin problemas.
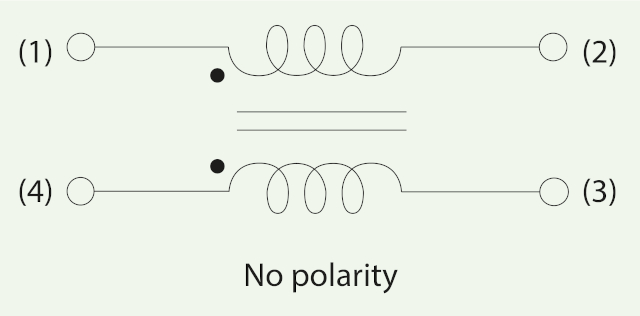
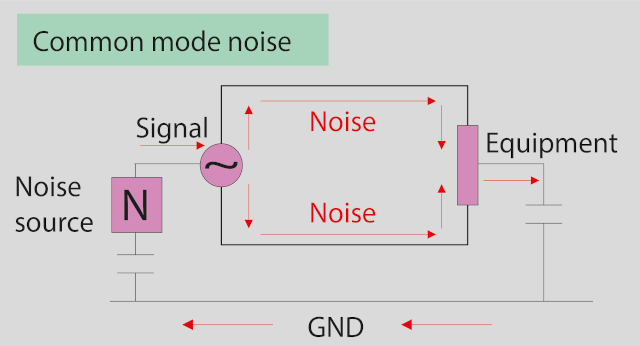
La figura anterior muestra el circuito básico de un choque de modo común, el comienzo de las bobinas opuestas está señalado con un punto negro. La topología de atenuación de modo común con una fuente de interferencia (en la izquierda) y un circuito diferencial (a la derecha) aparecen en la figura siguiente.
Choques para CAN o FlexRay
Hasta ahora, las redes LAN para el sector de la automoción han operado con velocidades de transmisión relativamente bajas de 1 o 10 Mbps. Emiten ruido en un amplio rango de frecuencia de hasta HF. Con el objetivo de evitar un mal funcionamiento, estas LAN deben mostrar una insensibilidad pronunciada a las interferencias radiadas. Esto se aplica particularmente a FlexRay, que se utiliza a la hora de conectar los sistemas de ABS, dirección asistida y transmisión y los controles del motor.
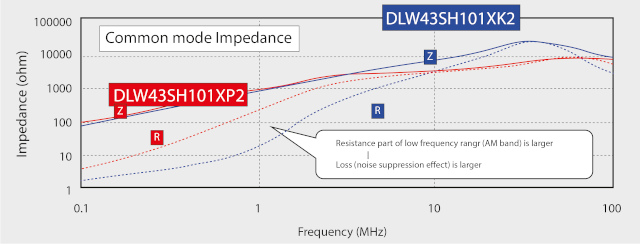
Los modelos de choques de modo común para aplicaciones CAN incluyen la serie ACT45B de TDK o las series DLW43SH_XK y DLW43SH_XP de Murata. Ambas gamas proporcionan un valor-R aumentado y, por lo tanto, mejoran la atenuación en el rango de frecuencia inferior (banda AM).
La figura muestra la curva de atenuación-frecuencia característica para las dos series de choques Murata mencionadas. Para las aplicaciones FlexRay, TDK ofrece la serie ACT45R o la serie ACT1210R de menor tamaño.
Si el espacio es un factor crucial, Murata dispone de la serie DLW32SH en un diseño 1210. En comparación con la serie DLW43SH_XK (diseño 1812), dota de una reducción del volumen cercana al 50 por ciento – pero con los mismos valores de inductancia.
Hace unos pocos años, se estandarizó CAN FD (ratio de datos flexible). Ofrece ratios de datos flexibles de hasta 10 Mbps y, al mismo tiempo, mantiene una comunicación CAN compatible (downward) sin necesidad de modificar el cableado existente. Para las aplicaciones CAN-FD, TDK recomienda la serie ACT1210 con valores de inductancia de 11, 22, 51 y 100 uH.
Automotive Ethernet para velocidades de transmisión y anchos de banda superiores
Ante el creciente aumento del número y la complejidad de las redes de datos para el automóvil, se requiere incrementar las velocidades de transmisión y los anchos de banda. Los sistemas de bus establecidos, como CAN y FlexRay, están llegando a su límite, particularmente con las elevadas ratios de datos demandadas por las tecnologías de infoentretenimiento, ADAS y coche autónomo (driverless). Las cámaras del vehículo usadas como sensores para funciones de asistencia y conducción autónoma también necesitan velocidades de datos mucho mayores.
Una nueva red basada en Ethernet, conocida como Ethernet en automoción – Automotive Ethernet, ha sido introducida para este propósito. Los nombres para la especificación de capa física son BroadR-Reach (Broadcom) y 100Base-T1.
Mucha gente considera que el futuro pertenece a Ethernet en automoción – sin embargo, en diferentes versiones y estándares. A medio plazo, se espera que sea el estándar de transmisión 1000BASE-T1 el que prevalezca. Ya es mucho más rápido que el 100BASE-T1 actualmente establecido. Y a largo plazo, parece que llegará una variante todavía más rápida de 10 Gbps. Para poder acelerar la comunicación a bordo del vehículo y los sistemas de control relacionados, las especificaciones de Ethernet se encuentran constantemente en fase de desarrollo; las redes de 25 Gbps ya están a debate.
Automotive Ethernet posee numerosas ventajas: cumple los estrictos requisitos de la electrónica del vehículo, soporta una temperatura de hasta 125 °C, resiste un estrés mecánico con velocidades de aceleración de hasta 4G en la carrocería y, por encima de todo, supera la normativa de compatibilidad electromagnética (EMC).
Choques de modo común para Automotive Ethernet
Los choques de modo común DLW32MH_XK de Murata y ACT1210L de TDK resultan ideales para el estándar 100BaseT. Ambos se encuentran disponibles con valores de inductancia de 100 y 200 µH y están especificados para operar en el rango de temperatura de -40 a +125 °C.
La serie de TDK es extremadamente compacta (3,2 x 2,5 x 2,5 mm³) y ofrece un excelente valor Scd21 (ratio de amplitud entre las señales diferenciales y las señales de modo común).
La serie DLW de Murata ha sido diseñada como versiones bobinadas en núcleos de ferrita con elevada frecuencia autorresonante, mínima atenuación de inserción y bajo perfil. Estos modelos se encuentran disponibles en varios tamaños de encapsulado que cumplen los estándares de automoción universal y AEC-Q200. El choque DLW32MH101XT2 es compatible con el estándar LAN de alta velocidad 1000BASE-T1 y, en consecuencia, resulta idóneo en aplicaciones de cámara.
Fue lanzado como la versión con menor tamaño de la industria para ratios de datos de hasta 1 Gbps, con una huella de 3,2 x 2,5 mm.
Además, es totalmente compatible con los parámetros-S (Sdd11, Sdd22, Sdd21, Scc21, Sds21, Sds12, Ssd21, Ssd12, TDR y ESD) especificados por el Ethernet OPEN Alliance SIG (Special Interest Group). TDK ahora también proporciona el ACT1210G-800-2P para Gigabit Ethernet en esta variante de pequeño formato.
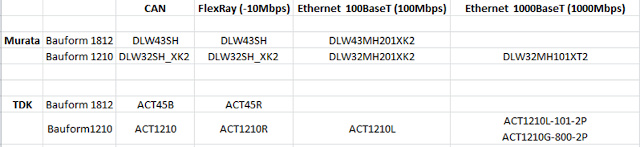
La Tabla 1 incluye los choques de modo común de Murata y TDK disponibles para la electrónica del automóvil, desglosados por los estándares de comunicación CAN, FlexRay y las versiones Ethernet más habituales.









{kind=link}